- New

close





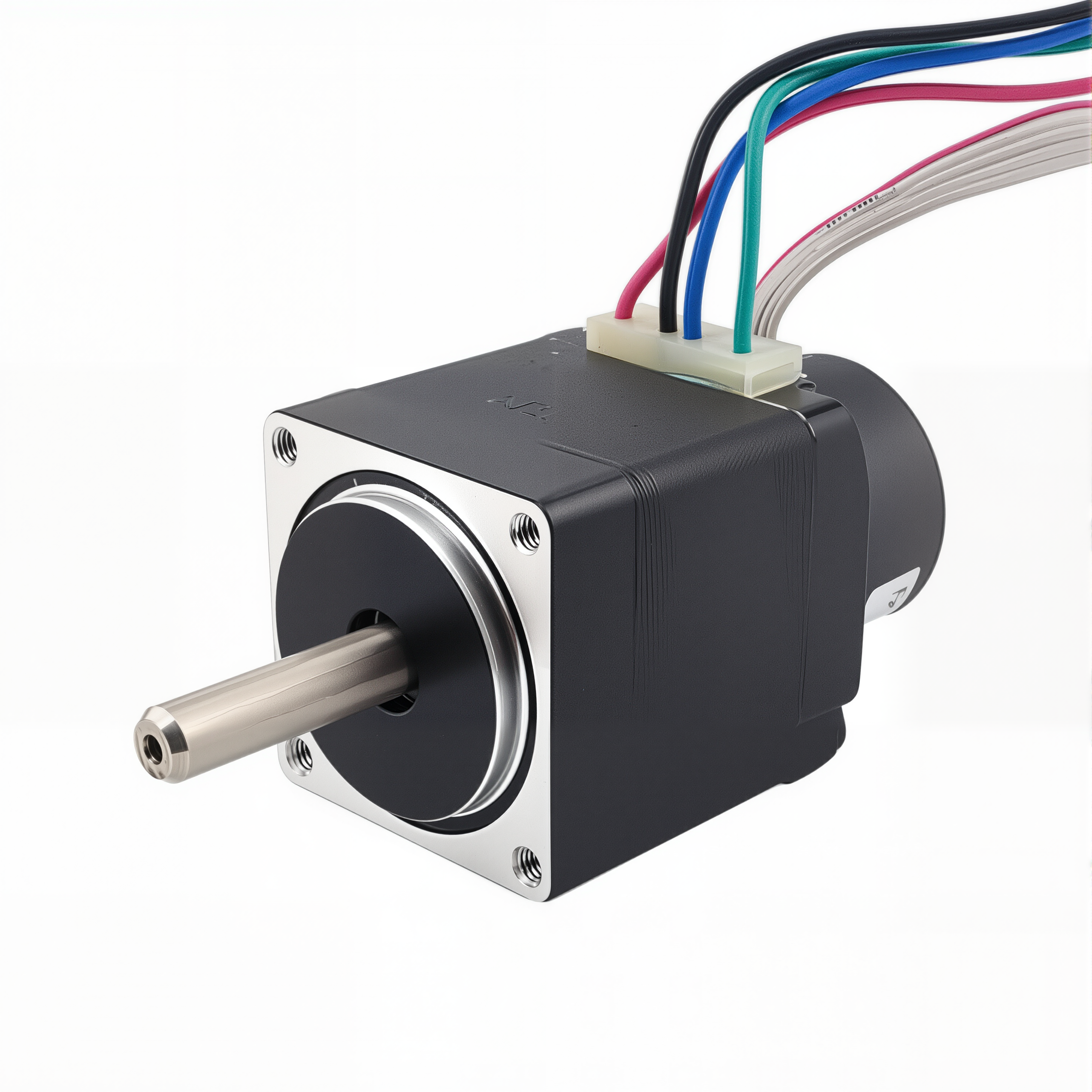
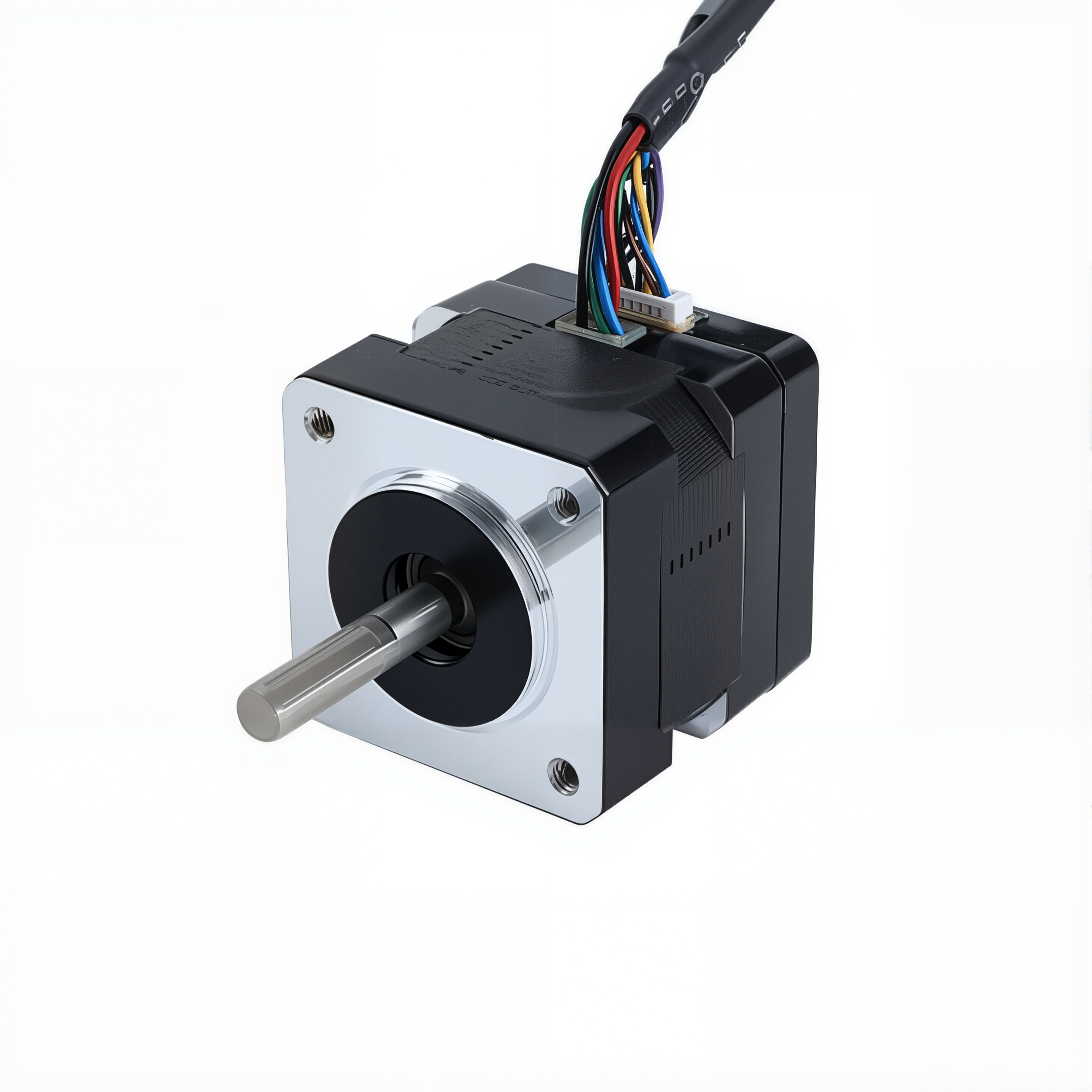
This Nema 24 closed-loop stepper motor delivers a robust 4.00Nm (566.45oz.in) of holding torque and is integrated with a compact magnetic incremental encoder offering 1000PPR (4000CPR) resolution with 3-channel differential output. Compared to optical encoders, magnetic encoders offer better durability in harsh environments, smaller size, and cost-effectiveness—making this motor ideal for applications requiring compact yet high-torque performance such as collaborative robots, medical devices, aerospace equipment, and automated industrial systems.
Integrated magnetic incremental encoder with 1000PPR (4000CPR) resolution
Differential 3-channel output for reliable feedback
High holding torque of 4.00Nm (566.45oz.in)
High current capacity: 5.0A per phase
Nema 24 frame with robust 10mm shaft
Compact and durable closed-loop design
Ideal for high-precision, space-constrained applications
Step Angle: 1.8°
Holding Torque: 4.00Nm (566.45oz.in)
Rated Current/Phase: 5.0A
Phase Resistance: 0.60Ω ±10%
Inductance: 2.60mH ±20% (1kHz)
Insulation Class: B (130°C / 266°F)
Frame Size: 60 x 60mm (Nema 24)
Body Length: 100mm
Shaft Diameter: Φ10mm
Shaft Length: 21mm
D-Cut Shaft Length: 15mm
Lead Length: 500mm
Weight: 1.71kg
Encoder Type: Magnetic Incremental
Resolution: 1000PPR (4000CPR)
Output Signal Channels: 3 (Differential)
Supply Voltage: 3.3V – 5.5V
Output Current: 20mA
High Output Voltage: 5V
Low Output Voltage: 0.2V
Max Frequency: 400kHz
Collaborative robotics
Medical and diagnostic equipment
Rail transit systems
Aerospace platforms
Industrial automation
Semiconductor manufacturing
High torque meets compact efficiency—engineered for precision motion control where space, reliability, and performance matter most.