- New

close





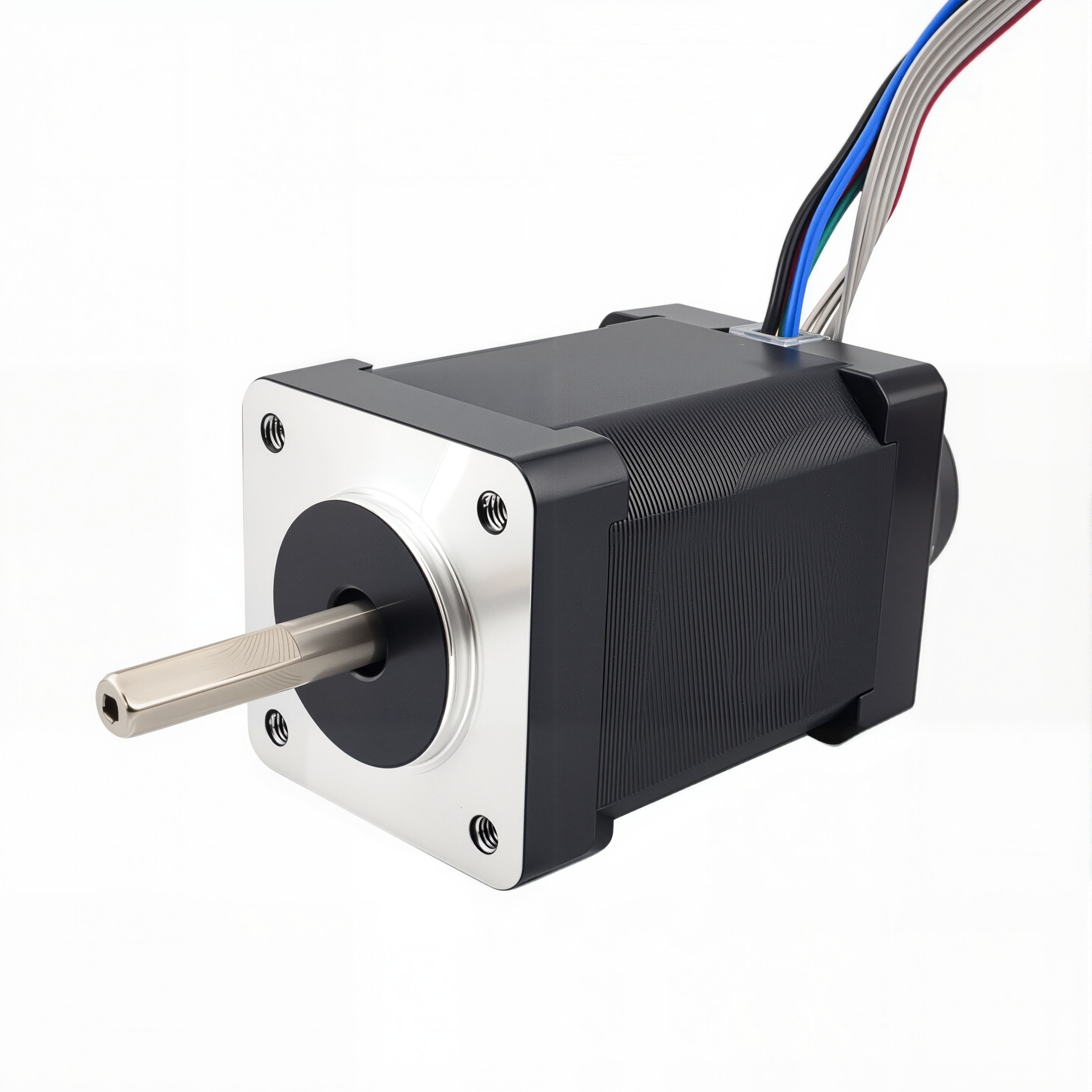
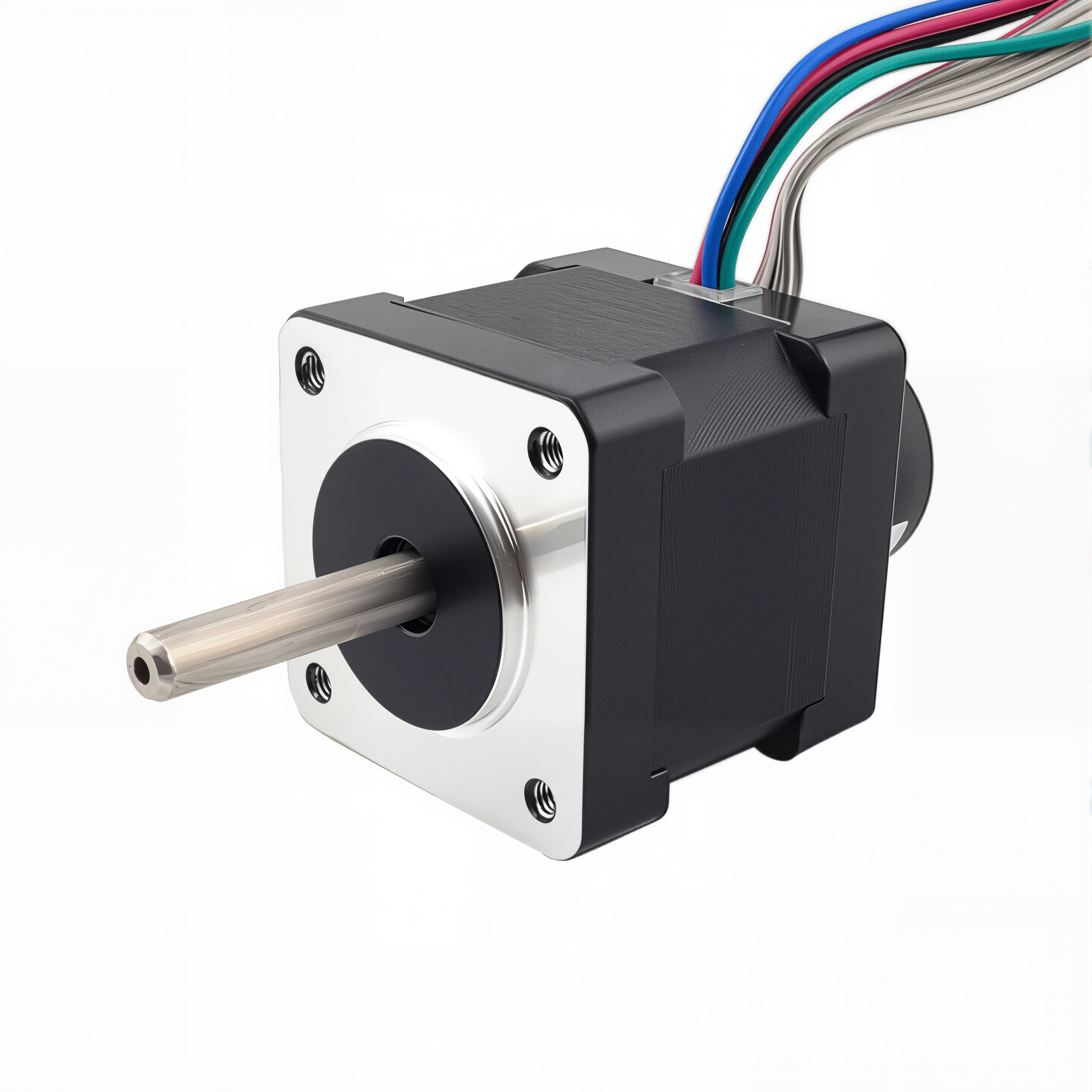
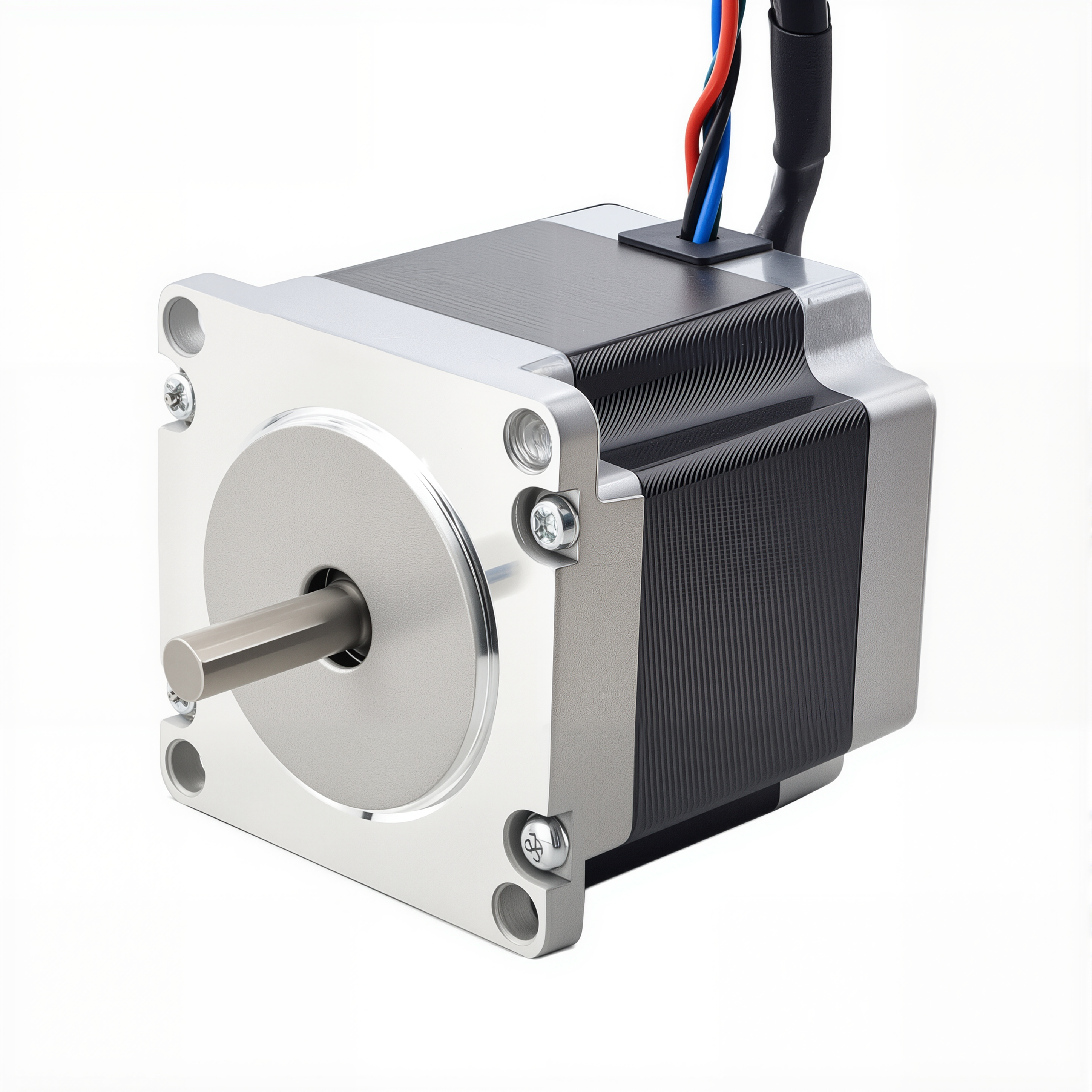
This Nema 23 closed-loop stepper motor delivers a high holding torque of 1.20Nm (169.93oz.in) and is equipped with a compact magnetic incremental encoder featuring 3-channel differential output and 1000PPR (4000CPR) resolution. Designed for superior torque output in a compact form, it is ideal for precision positioning in space-constrained applications such as collaborative robots, medical devices, rail transit, and aerospace systems.
High torque 1.20Nm holding torque with 1.8° step angle
Magnetic incremental encoder with 3 differential output channels
Compact 57x57mm frame and 56mm body length
Rated current of 4.0A with low phase resistance for efficient power use
Durable insulation class B (130°C) for reliable operation
Suitable for high-precision, high-torque applications in tight spaces
Step Angle: 1.8°
Holding Torque: 1.20Nm (169.93oz.in)
Rated Current/Phase: 4.0A
Phase Resistance: 0.50Ω ± 10%
Inductance: 1.7mH ± 20% (1kHz)
Insulation Class: B (130°C / 266°F)
Frame Size: 57 x 57mm (Nema 23)
Body Length: 56mm
Shaft Diameter: Φ6.35mm
Shaft Length: 21mm
D-Cut Shaft Length: 15mm
Lead Length: 500mm
Weight: 0.74kg
Encoder Type: Magnetic Incremental
Resolution: 1000PPR (4000CPR)
Output Channels: 3 Channels (Differential)
Supply Voltage: 3.3V – 5.5V
Output Current: 20mA
Output High Voltage: 5V
Output Low Voltage: 0.2V
Maximum Output Frequency: 400kHz
Collaborative robotics
Medical equipment
Rail transit systems
Aerospace precision control
Space-constrained industrial automation
Compact and high-torque Nema 23 closed-loop stepper motor with magnetic encoder, perfect for precise control in demanding, space-limited environments.